大物学习笔记(三) |
您所在的位置:网站首页 › 大学物理相位差可以大于2 兀嘛 › 大物学习笔记(三) |
大物学习笔记(三)
|
目录: 振动的概念任何一个物理量在某个确定的数值附近作周期性的变化。(这个范围是非常大的,不要小看这个范围。)例如电压的周期性波动(交流电)、水位的高低周期性波动、物体的来回摆动、人的心脏跳动这些都是属于振动。 机械振动物体在一定的位置附近做来回往复的运动。比如弹簧振子、摆动等。只要是实际物体的振动就行了。 简谐运动1.公式: x=Acos(\omega t + \varphi) 。简谐振动是特殊的机械振动。这里的 x 是振动物体所在的位置在x轴上的投影; A 是振幅,满足 A=\left| x_{max} \right| ; t 是时间;\varphi 是初相; \omega 是角频率,至于这里为什么是角频率先不解释后面再说,这个涉及到了旋转矢量图。这个方程也就是物体的位置随着时间的变化的方程。 2.常见的简谐运动:单摆、弹簧振子、摆动角度很小的复摆 (1)单摆:如图 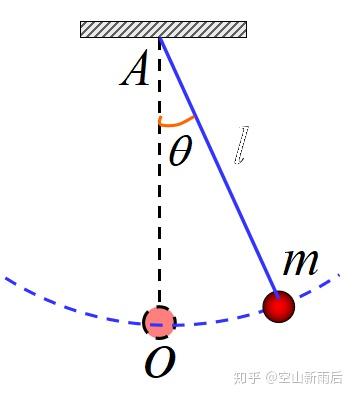 单摆的质量全部集中在摆锤上。常见的就是一根绳子拉住一个重物的来回摆动之类的都是单摆。有时候也说摆锤的质量远远大于摆杆的质量。 (2)弹簧振子:如图  在轻弹簧上绑上一个物体。然后给这个系统一个初始速度,之后产生的来回运动就是简谐振动。当有阻力的情况就是阻尼运动,在之后我们会讲到。 (3)复摆:当时老师一下子就带过了,我都还没有搞明白复摆是什么,后来查了一下才明白。如图: 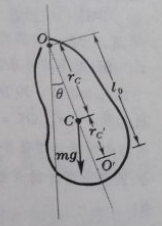 单摆的质量都集中在摆锤上,但是实际上有些时候这是不现实的,比较理想。当一个刚体通过一个不过质心的轴,在重力的作用下产生的摆动就是复摆。对于复摆的运动,可以用刚体转动部分的知识求解运动方程,因为作者不考这部分,也就不去推导了,哈哈哈哈。懒的话,可以直接去查一下百度。 3.推导过程:以弹簧振子为例。根据胡克定理,得到弹簧的回复力与质点位置的关系 F=-kx (对于这里是负数的解释,因为我们是以平衡点为原点。当我们x是正数的时候,指向平衡点位置的力一定是朝向x轴负方向的,所以 kx 一定是正数,而 F 是负数,所以加负号。当x是负数的时候同理。)。而 F=ma=m\frac{d^{2}x}{dt^{2}} ,所以 \frac{d^{2}x}{dt^{2}} + \frac{k}{m}x=0 。以下是解微分方程的步骤(如果以后有空的话,我把微积分也总结一下)。先求解方程 r^{2}+\frac{k}{m}=0 。易知该方程无实数解。得到一对共轭复根 r_{1}=\sqrt{\frac{k}{m}}i 和 r_{2}=-\sqrt{\frac{k}{m}}i 。所以通解 x=C_{1}cos(\sqrt{\frac{k}{m}} t)+C_{2}sin(\sqrt{\frac{k}{m}} t) ,再利用振动方程的合成且初始位置不确定得到 x=Acos(\sqrt{\frac{k}{m}}t + \varphi) 。如果不能理解一个三角函数加另外一个三角函数为什么是三角函数可以看一下下面这个图,这个应该是高中数学知识。 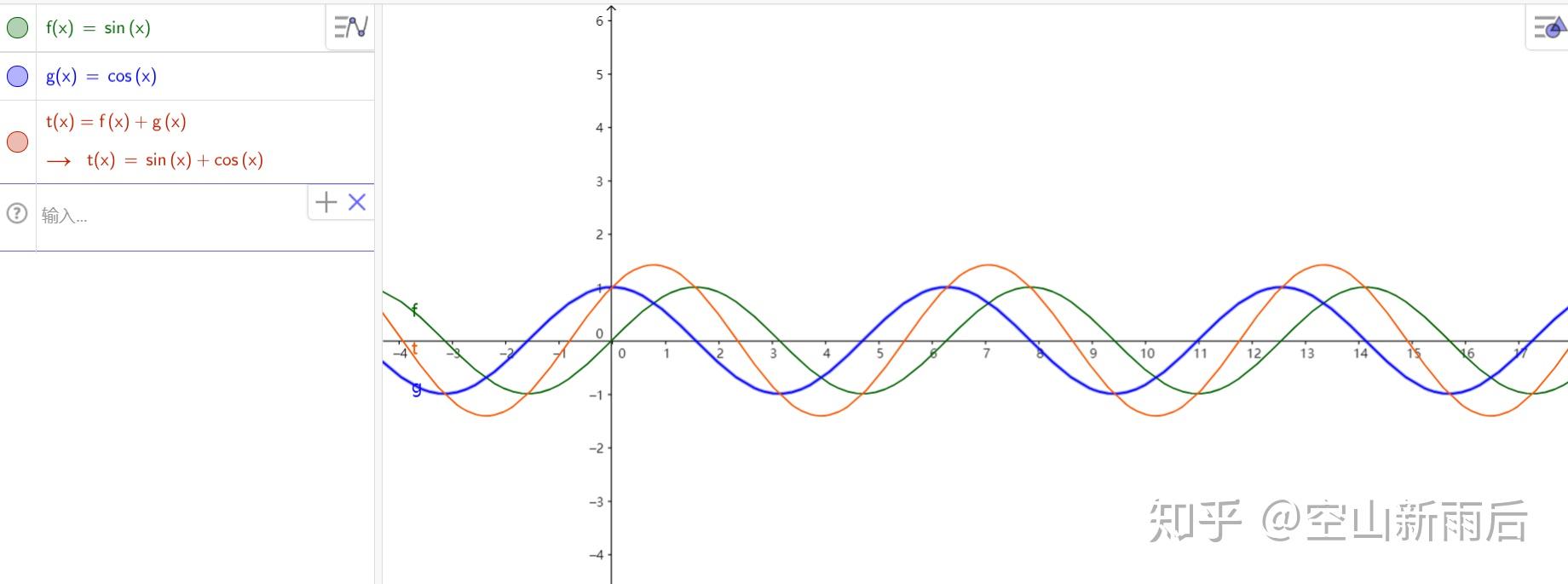 我们再令 \sqrt{\frac{k}{m}}=\omega (很容易知道m、k都是与运动状态无关的,所以其至于物体本身性质有关)。所以就得到了我们的式子 x=Acos(\omega t + \varphi) 。 简谐运动的速度和加速度1.公式: v=\frac{dx}{dt}=-A\omega sin(\omega t + \varphi) a=\frac{d^{2}x}{dt^{2}}=-A\omega^{2} cos(\omega t + \varphi) 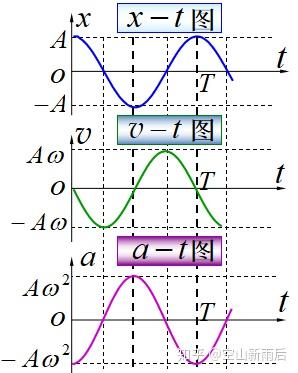 简谐运动常用物理量周期: T (单位是s)定义:完成一次全振动所经历的时间。常见物体的振动周期弹簧振子: T=2\pi \sqrt{\frac{m}{k}} 单摆: T=2\pi \sqrt{\frac{l}{g}} ( l 是摆长, g 是重力加速度。易知单摆的周期也至于物体本身性质有关与运动状态无关)复摆: T=2\pi \sqrt{\frac{J}{mgh}} ( J 是转动惯量, m 是质量, g 是重力加速度, h 是质心到转轴的距离。这个公式有一个非常广的应用,通过测量不规则物体的周期,来计算不规则物体的转动惯量)频率: \upsilon=\frac{1}{T}=\frac{\omega}{2\pi} (频率就是周期的倒数,单位是Hz)角频率: \omega=\frac{2\pi}{T}=2\pi\upsilon 相位: \omega t+\varphi (反映了物体当前的振动状态)初相位: \varphi (反映了物体在开始的时候振动状态)相位差: \Delta\varphi=\left( \omega_{1}t + \varphi_{1} \right) - \left( \omega_{2}t + \varphi_{2} \right) (描述两个振动之间的状态差) 简谐运动常用物理量周期: T (单位是s)定义:完成一次全振动所经历的时间。常见物体的振动周期弹簧振子: T=2\pi \sqrt{\frac{m}{k}} 单摆: T=2\pi \sqrt{\frac{l}{g}} ( l 是摆长, g 是重力加速度。易知单摆的周期也至于物体本身性质有关与运动状态无关)复摆: T=2\pi \sqrt{\frac{J}{mgh}} ( J 是转动惯量, m 是质量, g 是重力加速度, h 是质心到转轴的距离。这个公式有一个非常广的应用,通过测量不规则物体的周期,来计算不规则物体的转动惯量)频率: \upsilon=\frac{1}{T}=\frac{\omega}{2\pi} (频率就是周期的倒数,单位是Hz)角频率: \omega=\frac{2\pi}{T}=2\pi\upsilon 相位: \omega t+\varphi (反映了物体当前的振动状态)初相位: \varphi (反映了物体在开始的时候振动状态)相位差: \Delta\varphi=\left( \omega_{1}t + \varphi_{1} \right) - \left( \omega_{2}t + \varphi_{2} \right) (描述两个振动之间的状态差)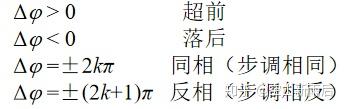 旋转矢量法 旋转矢量法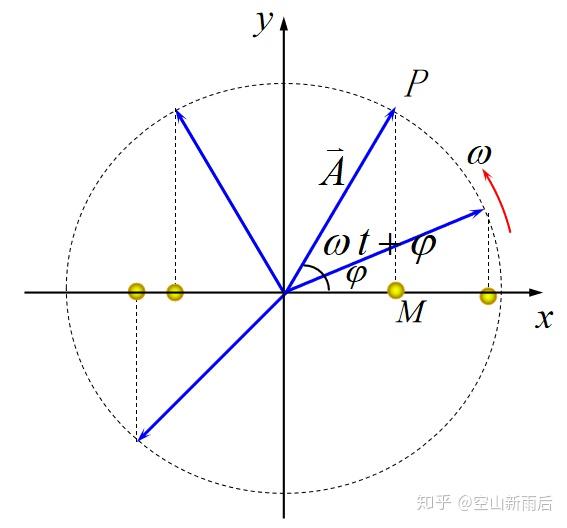 如图所示,假设矢量 A 与x轴正方向的初始夹角是 \varphi ,并且以 \omega 的角速度沿逆时针旋转。则在t时刻,夹角 \theta=\omega t + \varphi 。它在x轴上的投影就是 x=\left| A \right| cos\theta=\left| A \right| cos\left( \omega t + \varphi \right) 。所以当我们旋转矢量A的时候,矢量在x轴上的投影就是简谐运动。 如下图把,旋转矢量的坐标标定到坐标轴上就可以得到简谐运动的函数图。 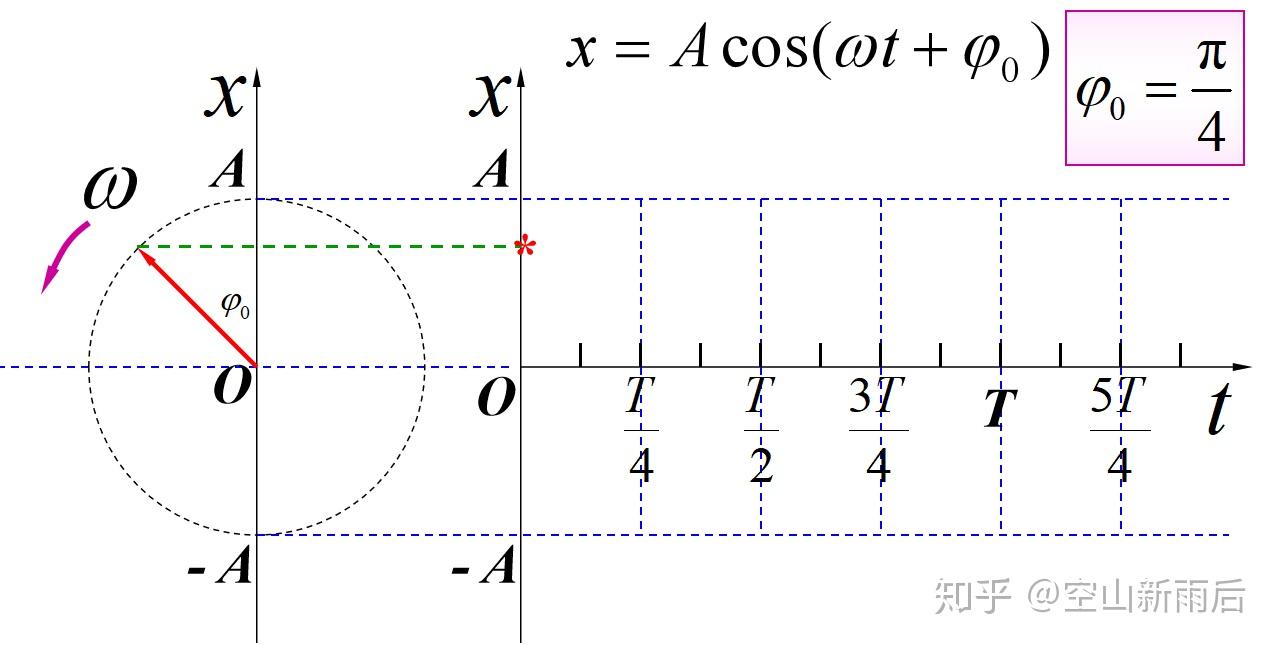 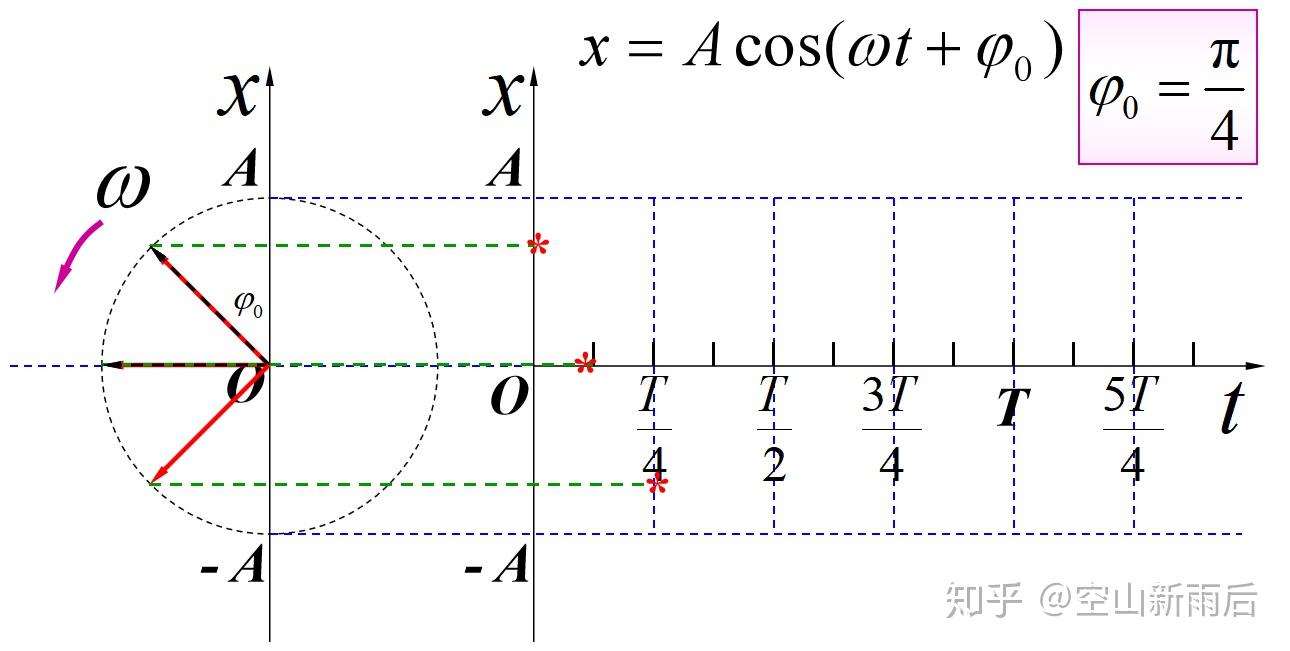 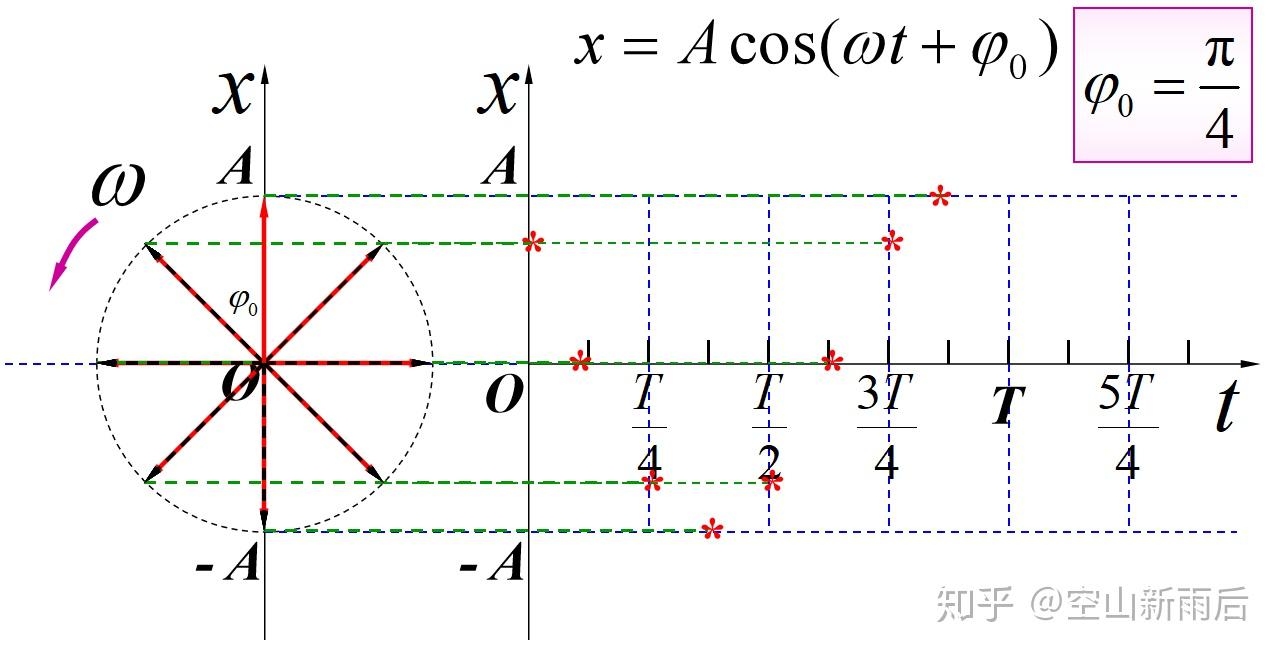 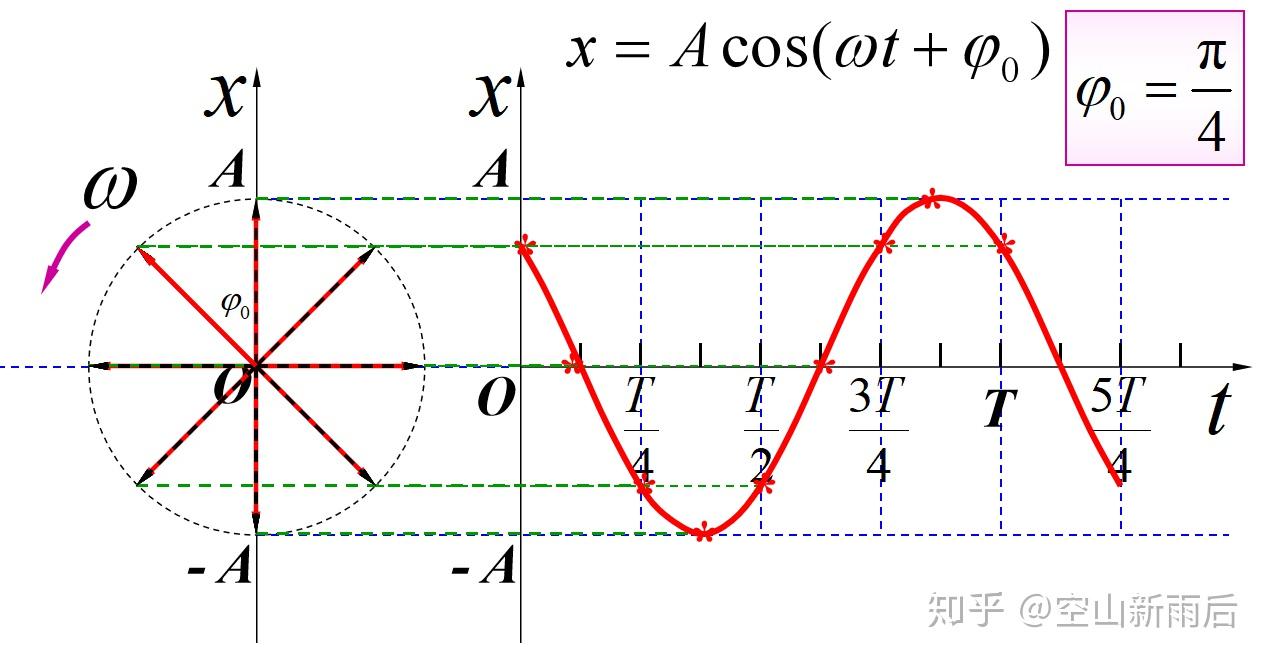 旋转矢量法的优越性: 直观展示简谐振动各参量的关系,便于确定 \varphi 的象限便于对两个或多个简谐振动进行比较便于处理简谐振动叠加问题简谐振动和旋转矢量法的比较: 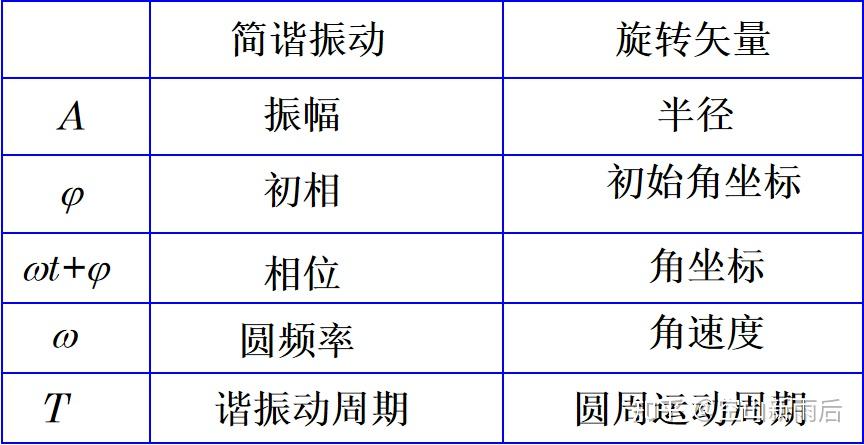 (大部分图片来自网络,侵删) |
【本文地址】